
2025년도 연구 계획
연구 분야: Active SLAM
연구 주제: SLAM 맵핑을 효율적으로 진행하기 위한 로봇의 자율주행 경로계획
연구원: 조형남
별칭: 마식(馬植)
이 전까지의 진행 내용
DWA를 RRT와 융합하여 로봇을 이동하는 것을 진행했었습니다. 이후 잠시 다른 곳에서 협력 요청이 있었어서 시뮬레이션을 하나 개발했었습니다. 나중엔 그 시뮬레이션을 기반으로 제 active slam을 실험하기 위한 시뮬레이션 제작과도 연결이 되는데, 이건 나중에 설명하겠습니다.
이후 새로운 주제를 찾기 위한 과정들을 거쳤는데, 이제 그 과정들을 소개할까 합니다.
앞과 마찬가지로 이 다음부터는 편한 말투로 작성했습니다. (쓰다 보니까 저렇게 쓰게 됩니다.)
(이 와중에 1월 초에 A형 독감에 걸렸었습니다. 건강 조심하세요.)
새로운 도전, 특허
학부생 마지막 시험기간동안 같은 내용만 계속 보기가 좀 그래서 불현듯 특허거리를 하나 생각했었다. 그 내용이… 지금 보면 별볼일 없어서 여기 블로그에 올려도 큰 영향은 없을 것 같다고 생각함.
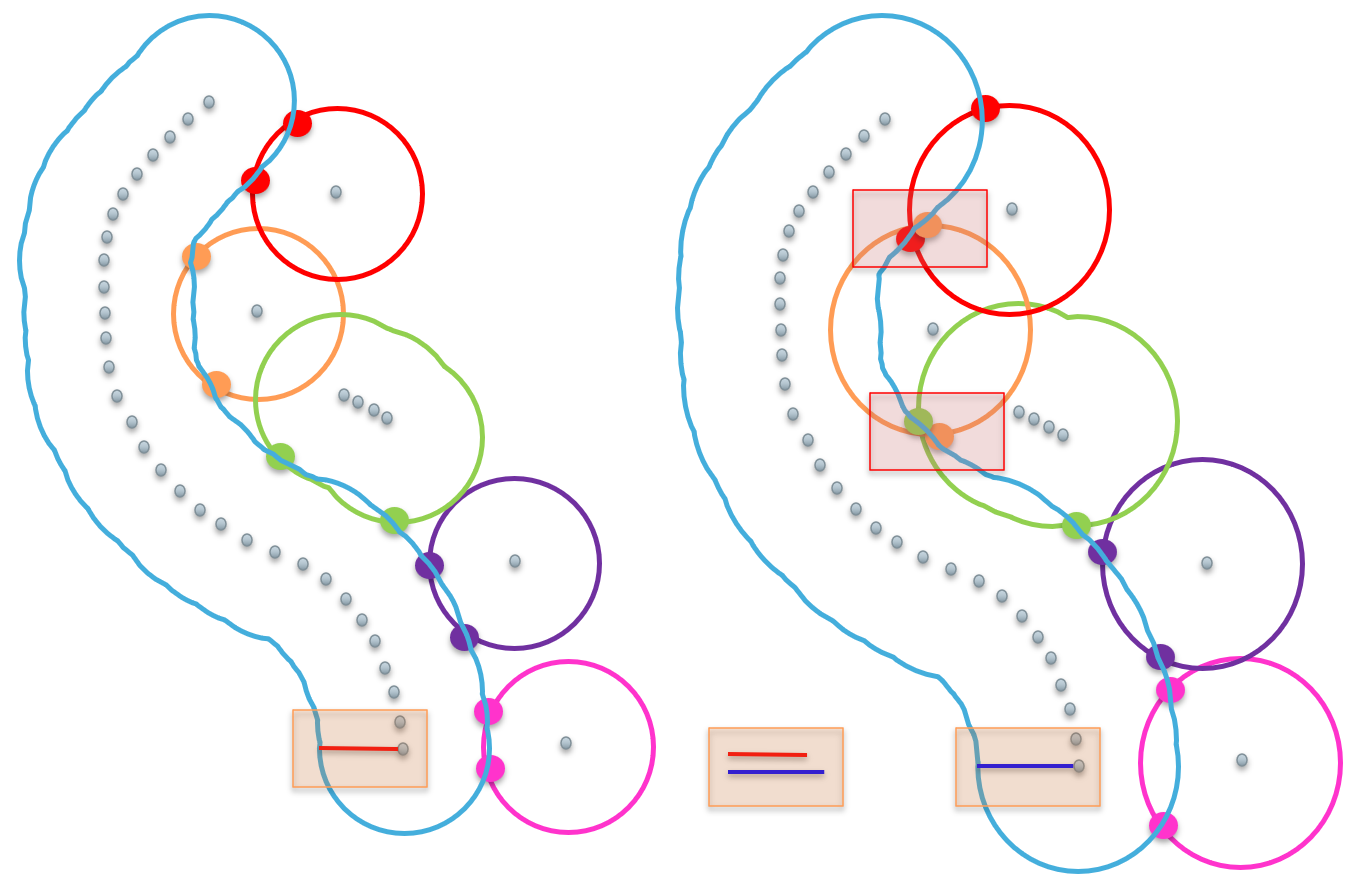
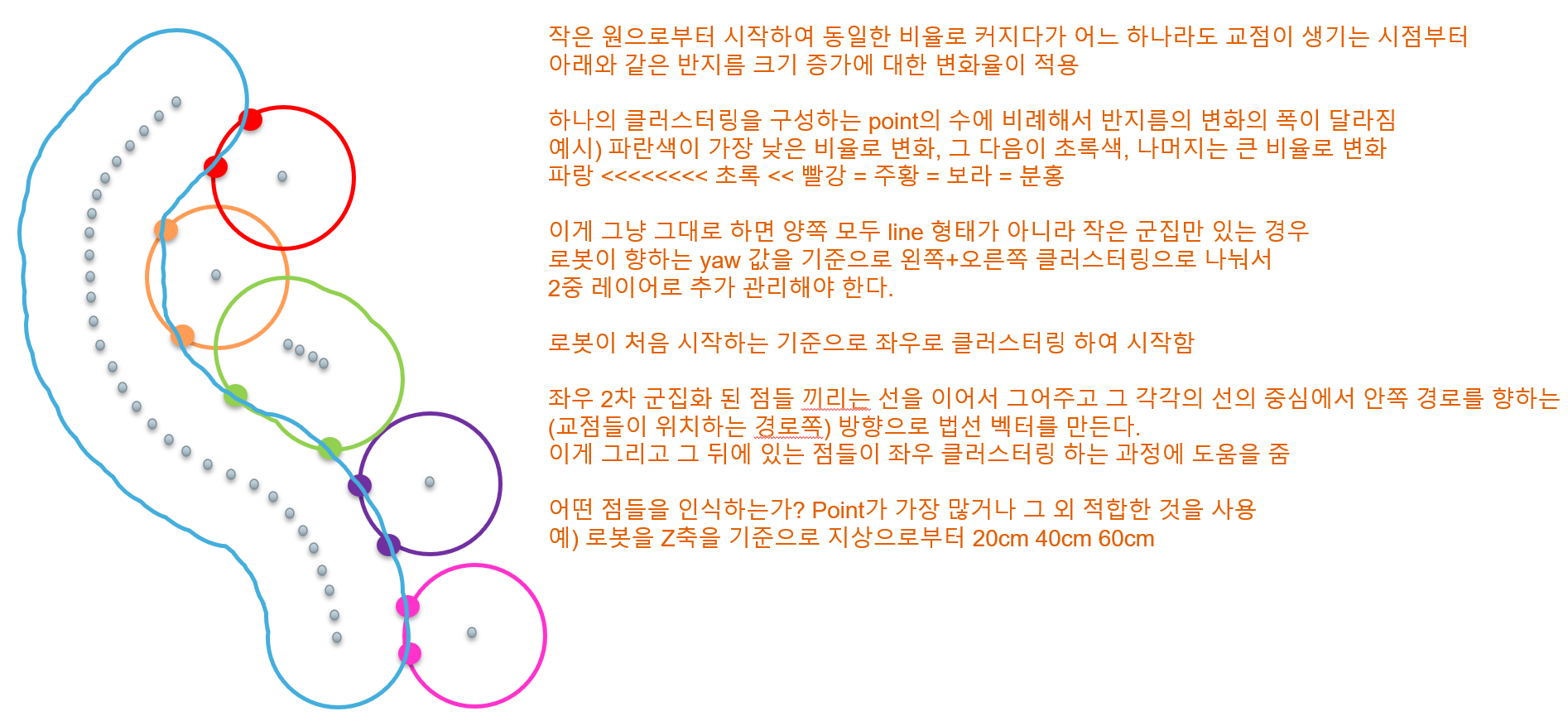
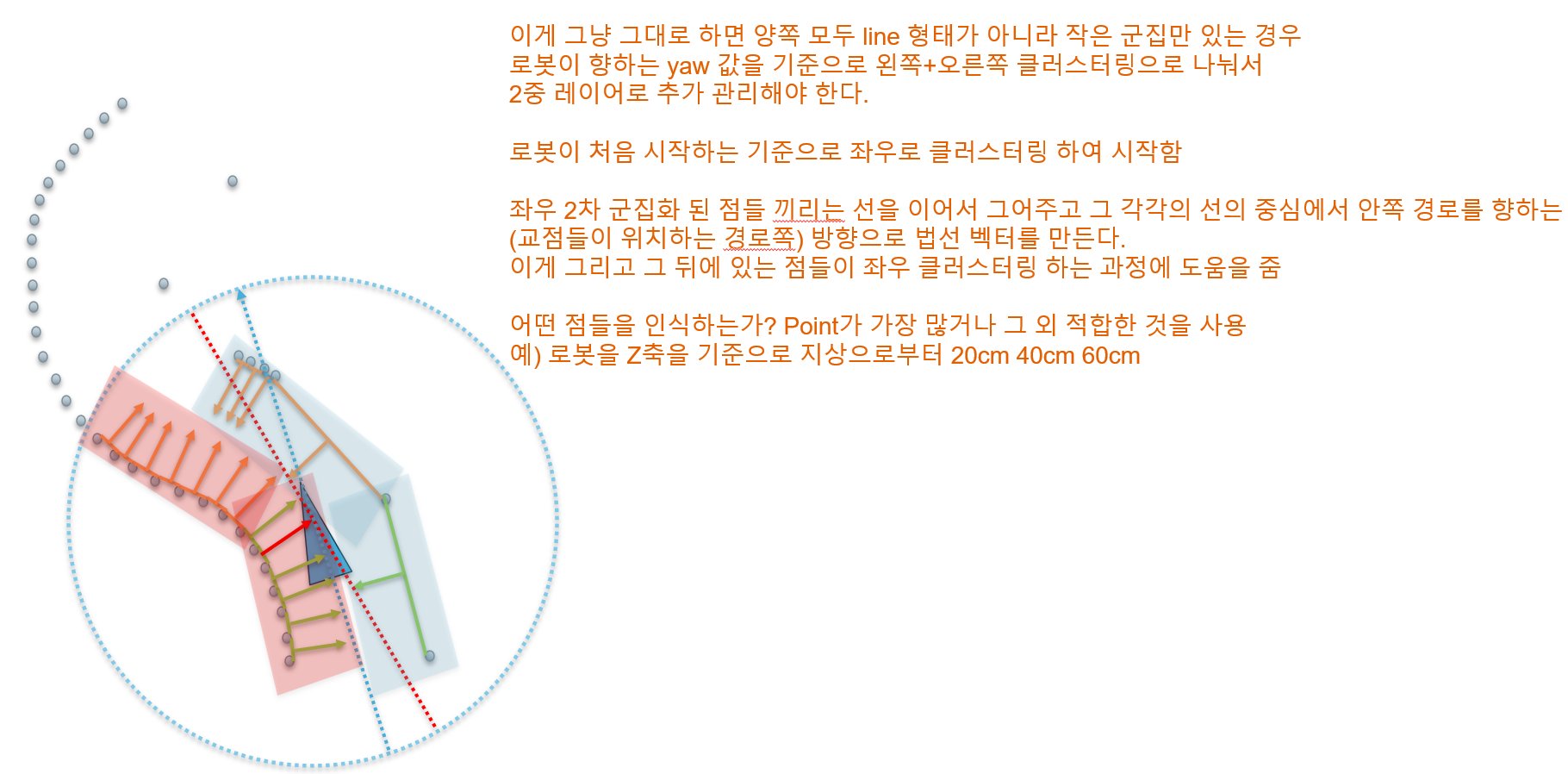
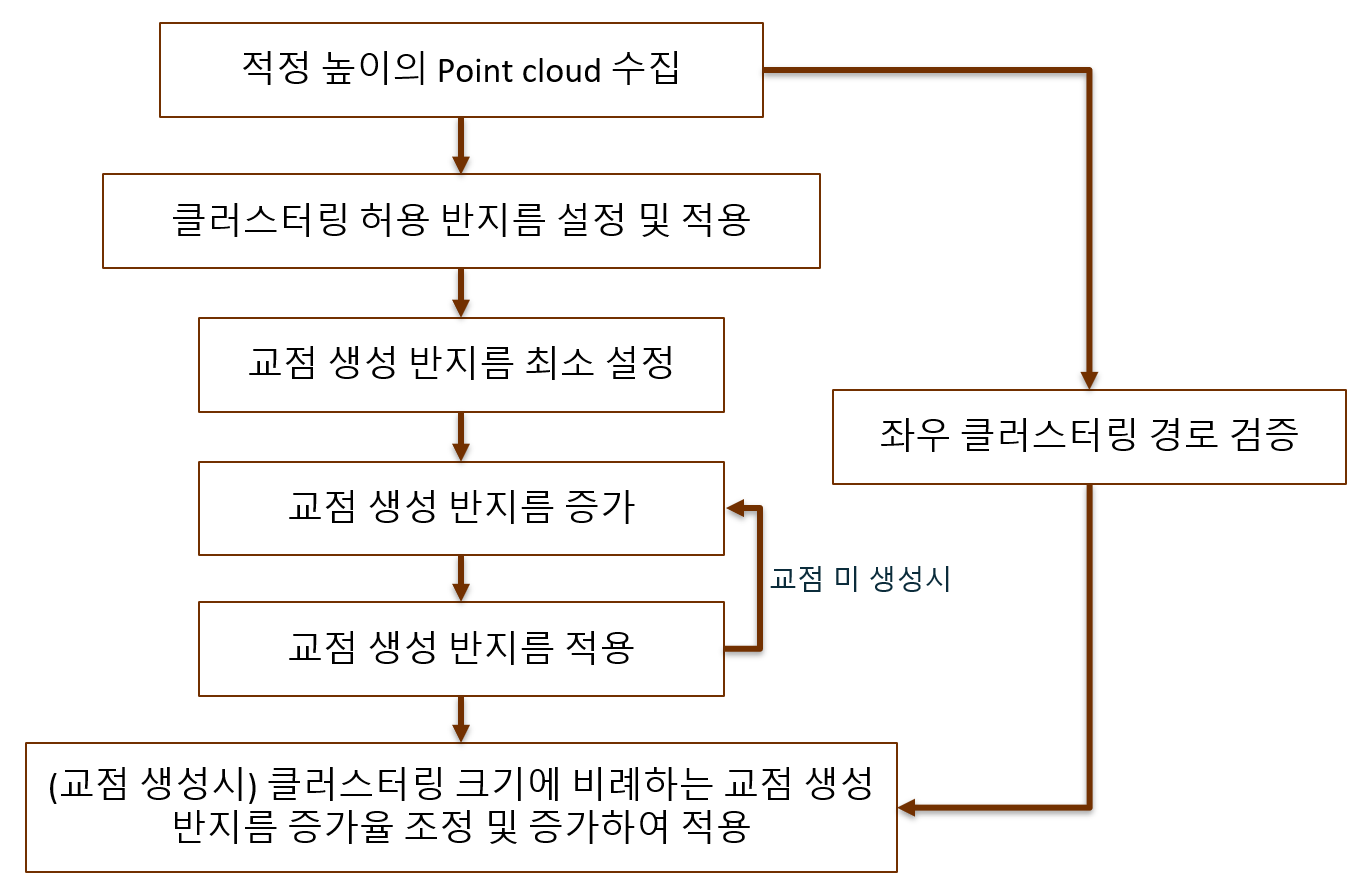
이게 ‘군집 쌍원 교차 경로 생성’ 이라는 아이디어 였는데, 요점은 벽면 혹은 라바콘을 LiDAR나 Scaner 같은 걸로 훑으면 그걸 클러스터링 한 다음에 원을 기반으로 뭉쳐주고, 그 도형들의 교점으로 이동 경로의 노드를 만들자는 아이디어였음.

사실 별 내용은 아니다. 이런게 특허로 쓸 수 있는가… 하면 쓸 수는 있다. 하지만 돈이 안되는 걸 넘어서, 쓸데 없는 유지비만 발생시키는 아이디어가 될 확률이 99%이다. 그래서 그냥 블로그에 올리는 것.
위 내용에 대한 설명은 각 첨부된 이미지들을 보면 되리라 생각되는데, 이 특허의 바람이 새로운 길을 잠시 인도하였다.
참고로 특허 계획은 무산되었다. 애초에 그동안 한게 특별한 성과가 있어야 하는 것인데, 잠깐 생겼던 아이디어가 좌초된 이상… 더이상의 동력은 없었기 때문이다.
주제를 찾기 위한 조사
당시 세미나 발표 시기와 맞물리는 떄였는데, 어차피 새 연구 주제를 찾으려면 논문을 많이 읽어야 하는 시즌이었다.
연구 분야는 우선 경로계획임은 분명 하였고, 선택지는 대략 3가지로 보였었다.
첫번째는 전역. 두번째는 지역. 세번째는 인식 융합.
놀랍게도 세번째를 먼저 고려하여 논문 조사를 하였다. 키워드로 설명하자면, ‘Object Detection’을 ‘Path Planning’에 적용한다는 개념이다. 이를 다른 말로 Perception Path Planning이라 부르는 것 같았는데, 문제는 내가 생각했던 ‘객체인식 + 경로계획’이 아니라 ‘객체인식’만 나오는 것이다.
논문 조사를 하는 과정에서 내가 되게 욕심이 많았나? 하는 생각이 들었다. 그래서 인식 융합은 포기하고, DWA와 경로계획 자체의 최신 트랜드를 조사하는 것으로 선회하였다.
그리고 이 과정에서 추가로 하나 더해지는 것이 있는데, 그것은 특허와 연구 동료를 통해 영감을 받은 ‘Skeleton algorithm’이다. 이것은 간단히 말해서 어떤 두께가 있는 물체가 있다면, 그 뼈대를 추출한다는 의미가 있는 알고리즘을 말한다. 그래서 이름이 ‘Skeleton’인 것이다.
아무튼 위와 같은 목표로 찾아보게 된 논문들이 몇편 있었는데, 그중 3개만 논문 대표 그림과 함께 간략히 소개하겠다.
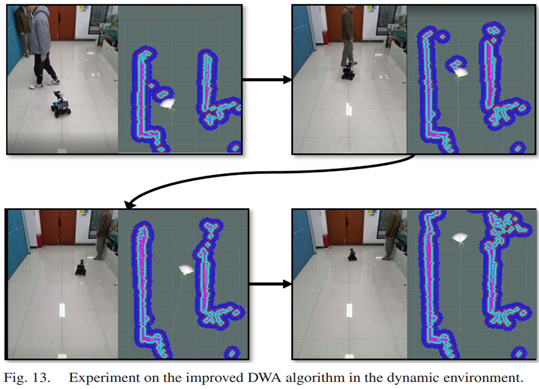
이 논문은 DWA와 APF를 융합한 새로운 지역 경로 계획을 말한다. 동적 장애물에 대한 효율적인 회피를 할 수 있다는 것이 주요 기여 사항.
이 논문은 세미나로 발표도 했던 논문인데, 그 중요성은 높지 않다. Polyfit(고차다항식을 통한 최소제곱법)을 통해서 동적 장애물의 미래 위치를 예측해서 효율적으로 피한다는 것인데… 말이 고차다항식이지 사실상 보면 1차 식만 쓴 것 같다. 5차까지 갈 필요도 없고.
다만 이 논문이 시사하는 것은 장애물의 미래 위치를 예측한다는 것인데, 이와 같은 생각으로 여러 확률 필터를 사용한 논문들도 있다는 것을 알게 되었다.
그래서 장애물의 위치를 확률 기반으로 예측해서 움직이는 경로계획을 연구할까 생각했었다. (그러나 연구분야로 선정되지 않았다. Active SLAM 전까지는 가장 유력했던 연구주제였음.)
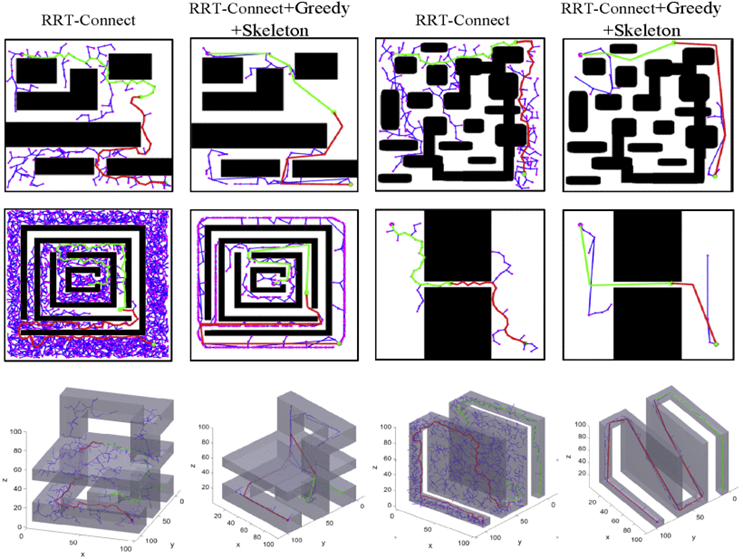
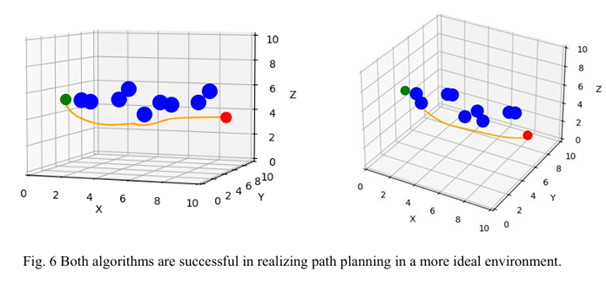
이는 특허를 생각하는 과정에서 첫 아이디어가 바로 좌초된 이후 Skeleton을 쓰면 어떨까? 하는 생각으로 조사한 논문이다. 위 논문의 경우 2차원 뿐 아니라 3차원에 대한 경로를 만드는데에 스켈레톤 알고리즘이 쓰였다. 이를 좀 더 발전시키면, SLAM을 통해서 매핑된 3차원 지도를 skeleton과 결합한다면? 되게 좋은 아이디어라고 생각했었다.
심지어 이와 관련된 논문이 있기는 있는데 별로 없었다. 2025년 1월 기준으로 본게 많이 쳐줘야 5개 정도? 와중에 1개는 arXiv였다. 그러면 충분히 수요는 있는데 아직 시작단계라는 의미인 것이라 생각되었고, 이는 유력 연구주제 2순위였다. (그리고 선택되지 못했다.)
이렇듯 경로계획이라는 틀 내에서 새로운 주제를 찾고자 많은 논문을 살펴보는 시간을 가졌었다.
그러나 결국 세미나때 교수님께서 말씀해주신 Active SLAM이라는 주제를 선택하게 되었다. 아마 오래 고민하시다가 결론을 내렸었는데, 말할 타이밍이 세미나였던 것 같다. (그리고 세미나직전 시점에서 독감 걸렸다.)
그렇게 2025년의 연구 주제는 Active SLAM이라는 topic으로 막을 올리게 되었다.
서베이 시작
지금까지 Active SLAM이라고 말하고 있었다. 그러나, 처음부터 Active SLAM이라고 알고 있지는 않았다. 교수님께서 말씀하신 것은 “3차원 공간 맵핑을 위한 미지의 환경에 대한 효과적인 최적 경로계획”이었다.
이 말을 토대로 한번 조사를 하라고만 말씀 하셨다. 지금와서 생각해보자면 Active SLAM이라는 주제를 뜻하는 단어에 알아서 도달하는지 시험하신 것으로 보인다. … 물론 아닐 것 같지만, 이렇게 생각하면 재밌으니까.
먼저 매핑을 위한 경로계획에 대해서 검색하면서 총 24개의 논문을 찾았다. 찾는 과정은 제목을 보고, 초록을 보고, 서론을 본다. 끝. 어지간하면 이정도고, 좀 아리까리하면 결론 파트나 방법론 파트를 보았다.
그러다가 Frontier에 대해서 접하였다. “Efficient and High Path Quality Autonomous Exploration and Trajectory Planning of UAV in an Unknown Environment”라는 논문을 한번 읽어봤는데, 여기서 사용한 방법론중 하나가 Frontier였던 것.
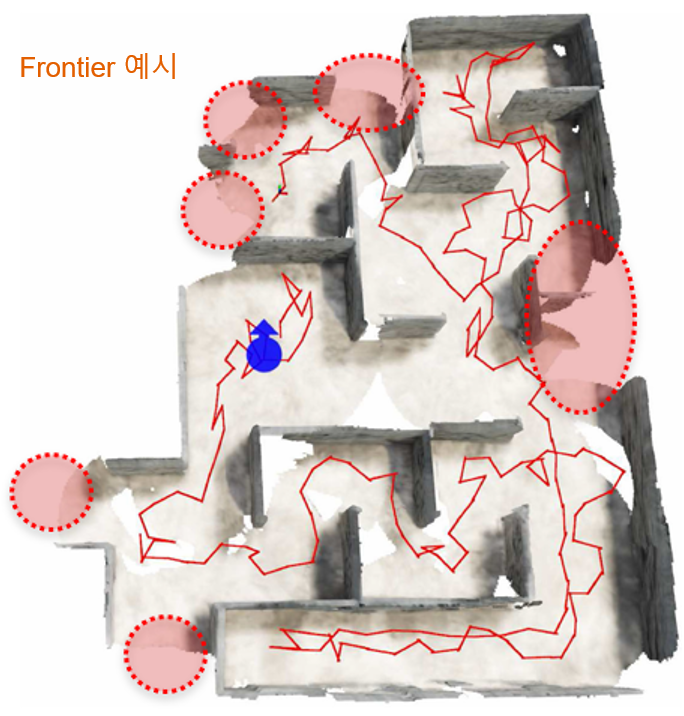
Frontier란 U(Unknown) F(Free) O(Occupied) 맵핑 방식에서 U와 붙어있는 F를 지칭하는 말이다.
이 Frontier가 존재한다는 말은 센서에 관측되지 않았을 뿐 아직 길(Free)이 있을 가능성이 존재하는 곳이기 때문에 이 부분을 계속해서 추적하면 로봇이 속한 해당 area를 모두 mapping할 수 있다는 의미인 것이다.
위 논문에서는 샘플링에 관한 내용도 조금 있는데, 중요하지 않아서 패스. 중요한 것은 이 Frontier를 사용한다는 것을 이 시점에서 캐치했다는 것.
그리고 논문을 좀 더 읽다보니 Active SLAM이 이 주제를 의미함을 확신하게 되었다. 이게 좀 애매했던게, 논문 조사하면서 이 단어가 계속 튀어나왔었는데 뭔가 단어 자체가 추상적인 감이 있어서 “3차원 공간 맵핑을 위한 미지의 환경에 대한 효과적인 최적 경로계획”이랑 “Active SLAM”이 동일한 의미를 가지는지 1~2개 논문으로 단정짓기 어려웠다. 그래서 수차례 논문을 조사한 결과 동일하다는 것을 알아냈다. 여기에 대충 2~3일 정도 걸렸음.
Active SLAM 조사
지금까지는 일종의 탐사 느낌이 짙었다. 그러나 1월 중순이 넘어가면서 본격적으로 드라이브를 밟기 시작한다. 이 시즌에는 연구실의 Jackal 로봇 세팅과 Turtlebot 4 세팅을 다시 준비하고 LiDAR들을 관리하기도 하였으며, Ouster를 사용하려는 시도가 있었다. (Ouster는 펌웨어 및 드라이버 이슈로 안되었지만… 그리고 이때 고등학생들 대상으로 하는 학교 전공 체험 행사 날이 섞여있었다.)
본격적으로 Active SLAM을 제대로 알기 위해서는 이 분야의 흐름을 잘 설명하고 그 원리를 잘 풀어서 쓴 논문을 보아야 했다. 그런 의미에서 이번 2025년 계획에서 소개할 가장 중요한 것은 Active SLAM을 알 수 있는 논문을 소개하는 것이다. 소개할 논문은 “Path Planning for Active SLAM Based on the D* Algorithm With Negative Edge Weights(2018)” 라는 논문과 “Autonomous Exploration Method for Fast Unknown Environment Mapping by Using UAV Equipped With Limited FOV Sensor(2024)”라는 논문이다.
위 두 논문은 별도로 누가 이 분야에서 이걸 추천하더라, 이런 경로를 통해서 알게 된 것이 아니다. 그저 30개의 주제에 적합한 초록을 가진 논문들을 조금씩 읽어보다가 그중 본인이 직접 선택한 논문이다. 때문에 이 두 논문은 지극히 마식_조형남의 개인적인 사견으로서 Active SLAM을 이해하는데에 도움이 된다고 생각됨을 염두에 두었으면 한다.
D* 알고리즘
“Path Planning for Active SLAM Based on the D* Algorithm With Negative Edge Weights” 논문 링크: IEEE
위 논문은 2018년에 발표되었으며, Active SLAM의 기본적인 원리들을 보여주는 논문이라 할 수 있다. 초심자라도 이해하기 어려운 개념들을 많이 사용하진 않고, 무엇보다 서론(겸 배경 연구)에서 Active SLAM을 이해하기 쉽게 설명한다. 그래서 이 논문이 좋다고 생각했다.
위 논문에서는 아래와 같은 구조로 이루어진다고 한다.
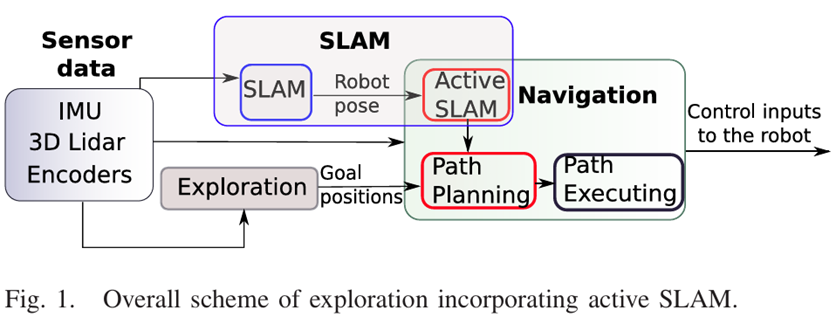
Fig 10은 그냥 논문의 전체 개괄적인 내용이라서 상징적으로 넣었다. 중요하진 않다. 중요한 것은 다음 그림인데, 논문의 핵심이다.
이 논문에서는 우선 여러 SLAM 중에서도 Graph-based SLAM에 대한 개념을 아는 것이 매우 중요하다.
Graph-based SLAM
Graph-based SLAM을 간략히 설명하자면 다음과 같다.
Node와 Edge로 구성되는 Graph를 구성하는 방식으로 지도를 맵핑한다. 이때 Node는 방향과 pose값을 가지고 있고, Edge는 제약(constraint)을 가진다. 이 제약이라는 것은 앞 노드와 뒷 노드 사이의 제약인데, 쉽게 말해서 둘의 위치 차를 의미한다. 이 둘을 정리하면 이렇게 된다.
Node: 로봇의 시간별 자세(pose) $\rightarrow$ 변경 가능
Edge: pose간의 제약조건 $\rightarrow$ 변경 불가능 $\rightarrow$ 사실 변경 가능
여기서 변경 가능하니 마니 이런 말이 있다. 이 말은 무엇이냐면 주어진 Node와 Edge를 통해서 맵핑 한번 하고 끝이 아니기 때문이다.
Graph-based SLAM의 꽃은 최적화이다. 최소 제곱 최적화를 통해서 Edge(constraint)를 기반으로 적합한(최적화된) Node의 위치들을 재구성한다. 그래서 Node와 Edge를 로봇이 측정하면서 이동할 때 초기 매핑하는 과정은 Front-End라 하고(Loop Closing 감지하는 것도 포함), 최소 제곱법을 통해서 그래프의 최적화를 하는 작업은 Back-End라고 한다.
이때 Edge는 변경 불가능이었다가 나중엔 변경 가능하다고 말했는데, 일단은 상수 취급 해주면서 Node를 재구성 한다. 그러나 최적화 과정에서 각 Edge에 대해서 오차 범위 내에서 변경을 하는 것이다. 즉, Edge는 어느정도 오차를 감안해서 그 범위에서 변경한다는 것이고, Node는 그런 범위 없이 바뀐다는 것을 말한다.
그리고 Loop Closing이란 것이 중요하다. Fig 11을 보면 알 수 있는데, Loop Closing이란 이미 지나온 길을 다시 가서 경로가 Loop되는 지점이 생기는 것을 말한다.
Loop Closing은 기존 Node와 현재 리얼 타임으로 새로 생기는 Node사이의 새로운 Edge 관계를 추가하는데, 이는 곧 정보의 추가를 의미한다. 바로 최적화를 하기 위한 정보의 추가. 그러므로 Graph-based SLAM에서는 Loop Closing이 존재할 경우 매핑 정확도가 올라가게된다.
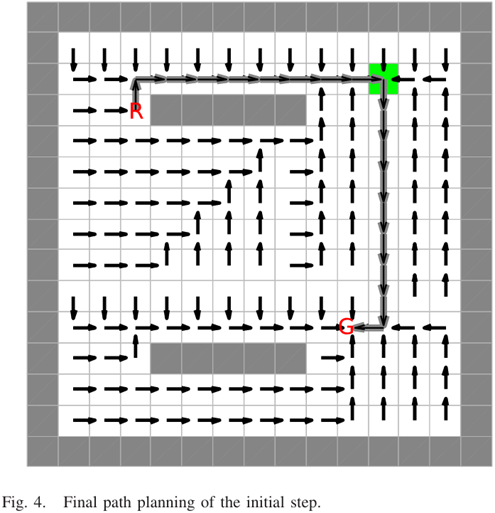
위 그림을 보면 그래프의 R이랑 G, 그리고 초록색이 있다. R은 로봇의 처음 위치. G는 목표 지점. 그리고 초록색은 바로 경유지를 의미한다.
우리는 이 초록색 경유지를 설정하는 것에 집중해야 한다.
경유지는 일반적인 D* 알고리즘 만으로는 만들 수 없다. 그래서 본 논문에서는 Negative D* 알고리즘을 제안한다. 이는 음의 가중치를 사용하여 해당 노드에 대해서 목적지보다 먼저 들르게끔 유도하는 효과가 있다. 특히 ND*는 경유지를 들른 직후 바로 그 노드의 가중치만 정상화 시켜주면 바로 별다른 버그 없이 원래 목적대로 사용할 수 있다는 깔끔함도 있다.
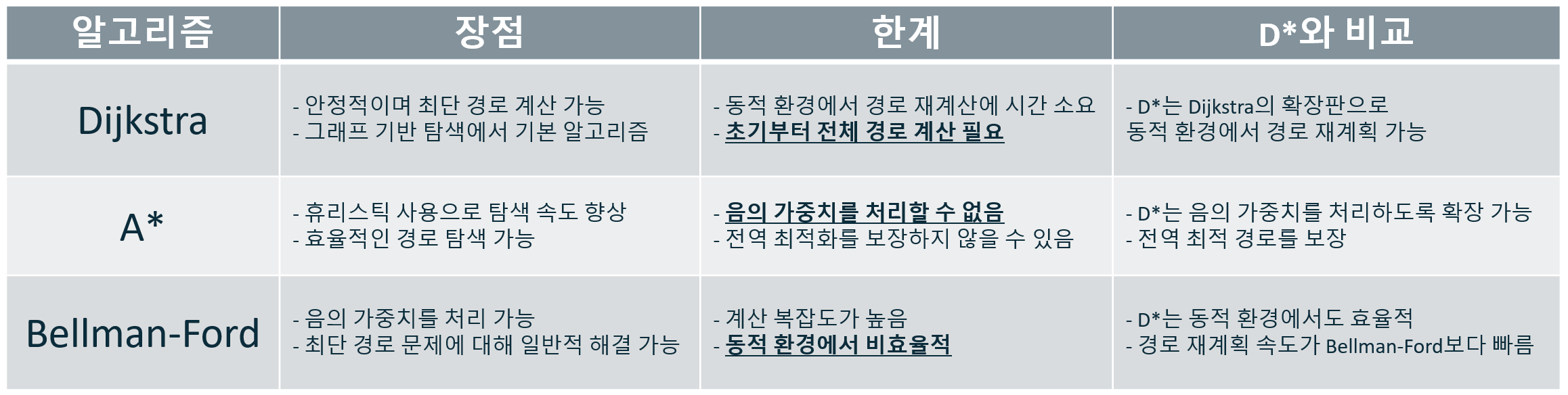
그러면 왜 굳이 D* 알고리즘을 사용했는지 이유를 알아야한다. 각각은 분명 좋은 아이디어임은 맞으나 각각 치명적인 약점이 있다. 다익스트라의 확장 버전이 D* 알고리즘인데, 원본보다 동적 환경에서의 계산이 더 빠르다. 그리고 A*는 음수 가중치를 사용할 수 없으며, 벨만포드는 동적 환경에서는 계산 비용이 매우 높아진다. 이같은 이유로 D* 알고리즘을 선택한 것이다.
그러면 이 D* 알고리즘이 동적 환경에서 어떤 움직임을 보이는지 알아보자면, 다음 유튜브 영상을 보면 된다.
만약 유튜브를 들어가기 여의치 않다면 다음 그림을 보면 된다.
위 흐름을 보면 알 수 있는건, D* 알고리즘 자체가 뭘 하나 수정하더라도 전체 지도에 대한 연산을 통째로 바꿀 필요 없이, 일부만 수정해도 된다는 것이다. 동시에 경유지를 설정할 때, 가급적 들르면 좋은 것이지 꼭 들러야 하는 것을 의도하지 않을 수 있다는 점에서 강압적이지 않고 부드러운 연산을 유도한다는 장점도 있다.
이같은 점들을 통해 위 논문의 핵심은 경유지를 설정하는 것과 그 경유지는 ND* 알고리즘을 통해서 구현한다는 것이다. 이를 통해서 미지의 장소에 대한 SLAM을 효과적으로 진행할 수 있는 경로를 도출한다는 것이다.
이를 흐름으로 말하면 다음과 같다.
- 최초 시작시 스캔+이동 시작
- 이동시 Frontier를 찾아서 이동
- 이동중 장애물 발생시 D* 알고리즘 수정을 통한 회피
- 이미 지나온 길인 경우
- 현재 로봇과 근처의 인지된 Node의 거리가 임계값 미만인 경우 지나온 길임을 인식
- 임계값 미만인 Node들을 후보화
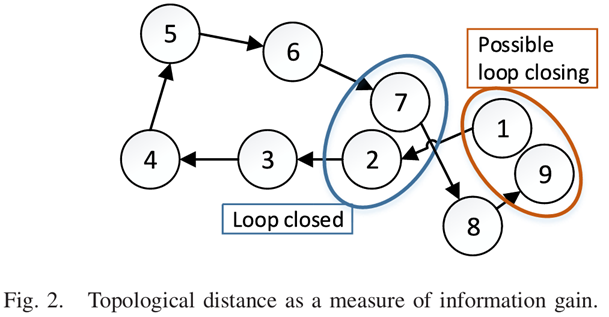
- 후보 Node들 중에서 토폴로지 거리가 임계값 이상인 경우 Loop Closing 선정
- 해당 Loop Closing에 대해서 지도상에서의 음수 가중치 부여
이때 음수 가중치는 다음 공식을 따르며 부여한다.

이 식이 의미하는 것은 현재 위치과 음의 가중치를 부여할 위치 사이의 토폴로지 거리값 차이가 클수록 비례하여 큰 값을 주는 것을 알 수 있다.
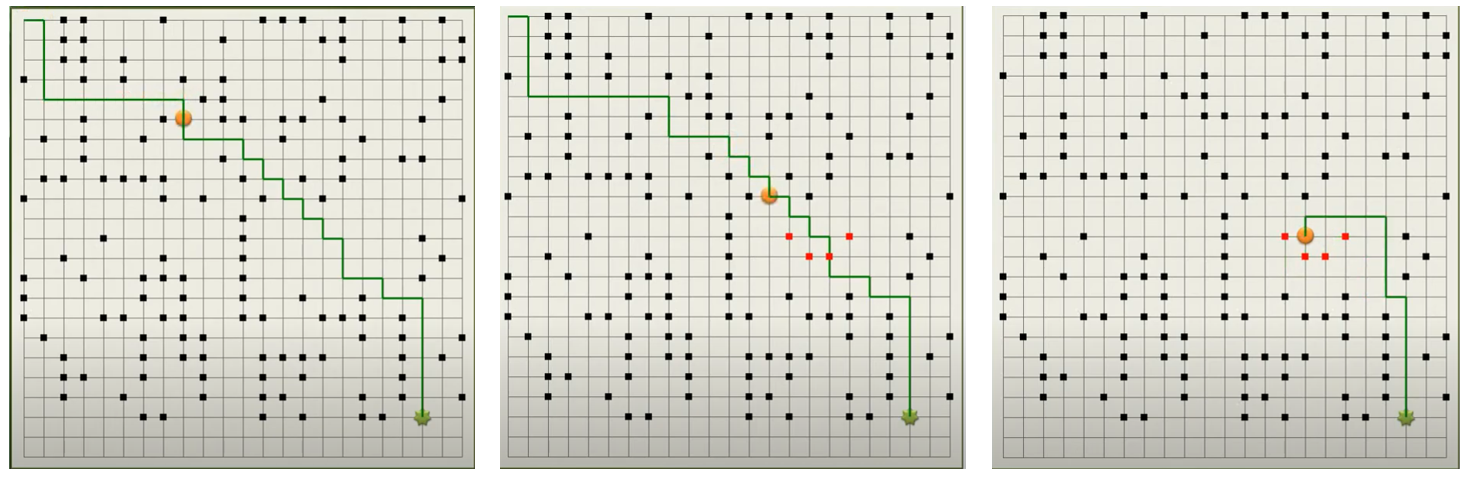
이런 방식을 사용하여 Active SLAM을 진행하게 되면 어떤 모습을 그리는지 보자.
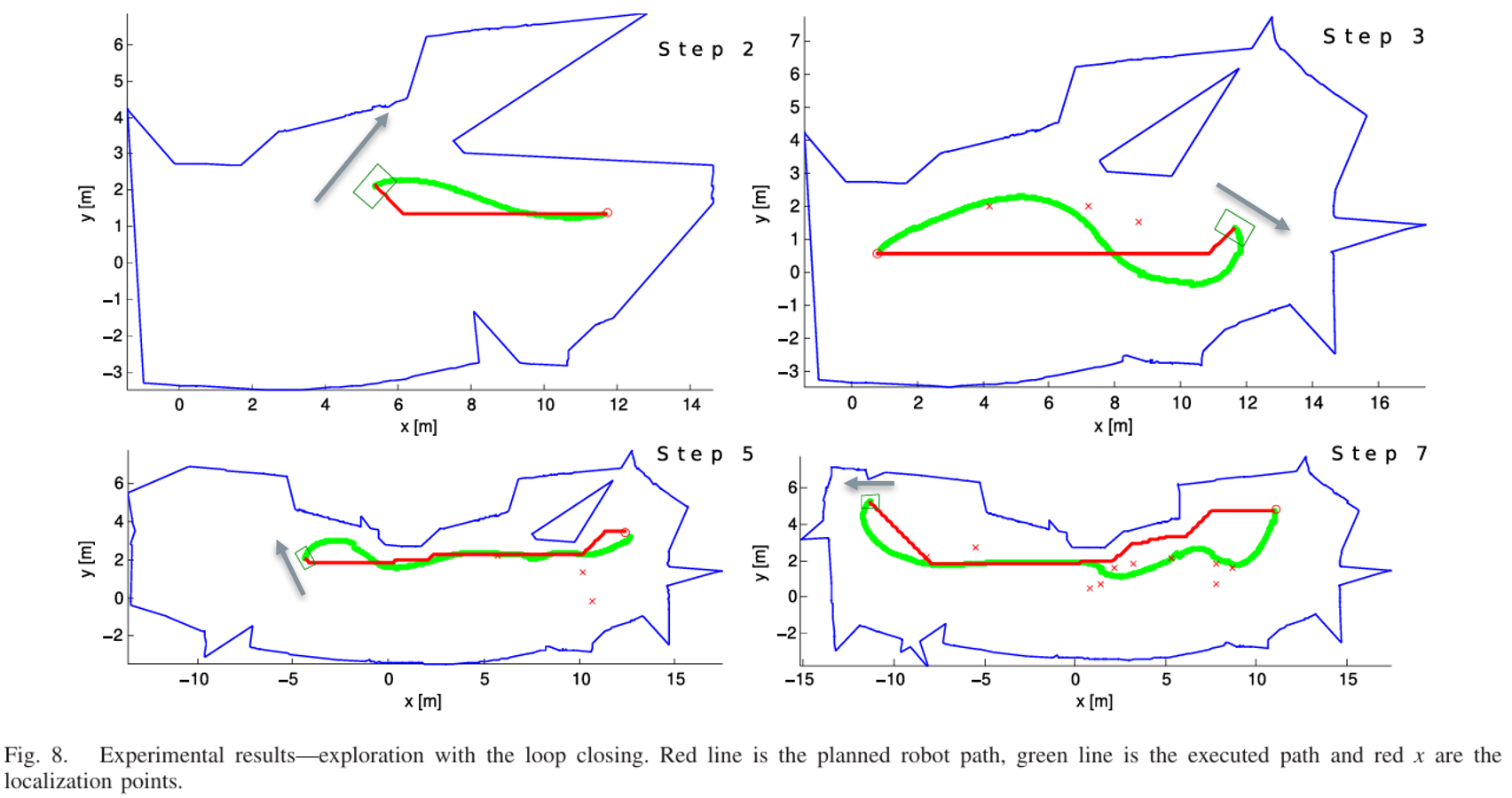
솔직히 이렇게 보면 무엇을 의미하는지 알 수 없다. 이걸 자세히 설명하기에 앞서서 무엇이 뭘 의미하는지 간단히 알아보자.
- 빨간 선 (Planned Path):로봇이 ND* 알고리즘을 통해 계산한 계획된 경로
- 초록 선 (Executed Path):로봇이 실제로 이동한 실제 경로
- 빨간색 X (Localization Points):루프 클로징 지점을 나타냄
- 폴리곤 (Explored Area):탐색된 환경(그림의 폴리곤 크기는 탐색 진행에 따라 점진적으로 확장)
- 직사각형 (Robot Position):로봇의 현재 위치
설령 위 기호의 뜻을 알더라도 그 뜻을 파악하는 것은 어려우므로 차례대로 확대하여 설명을 진행하겠다.
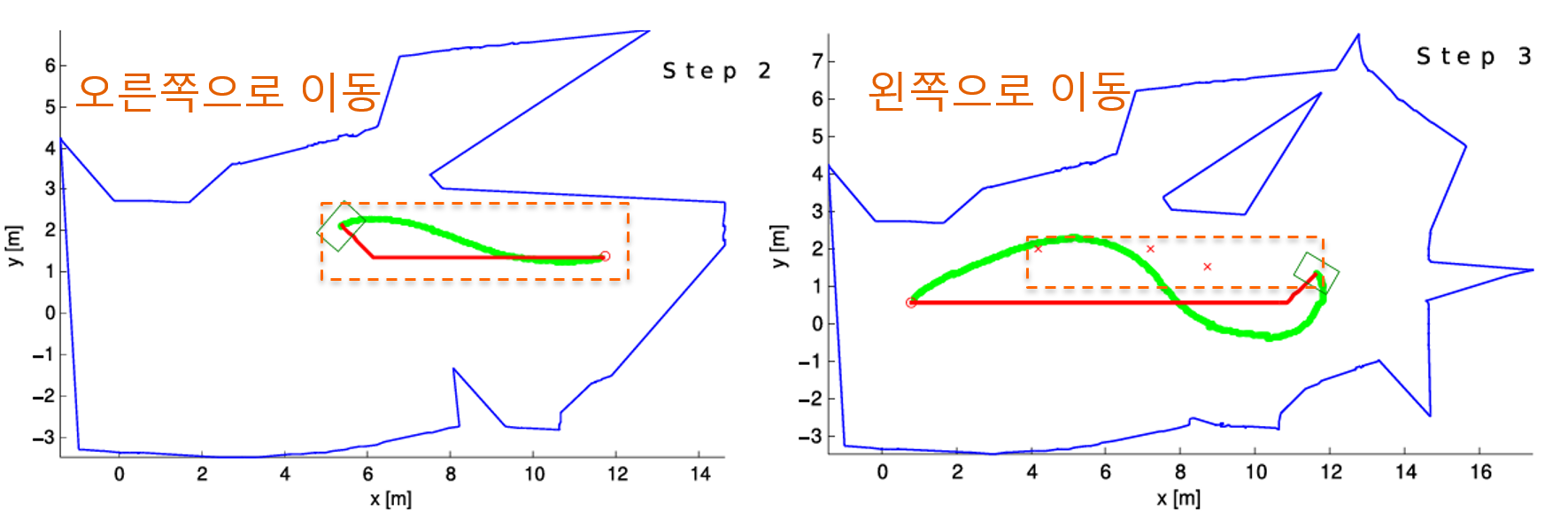
우선 스텝 2에서 시작하여 움직인다. 이때 뭔가 ?를 그리다 마는 궤적으로 왼쪽에서 오른쪽으로 이동한다.
그리고 나서 스텝 3에서는 로봇이 오른쪽에서 왼쪽으로 이동한다. 그런데 지도를 보면 Loop Closing을 의미하는 빨간색 X 표시를 볼 수 있는데, 이 위치는 스텝 2에서 왔던 그 경로이다. 그 경로들 중에서 Node가 생겼고, 다시 돌아가는 과정에서 Loop Closing을 일으킬 Node를 따로 선정하여 해당 위치를 경유지로 하게끔 유도한 것이다.
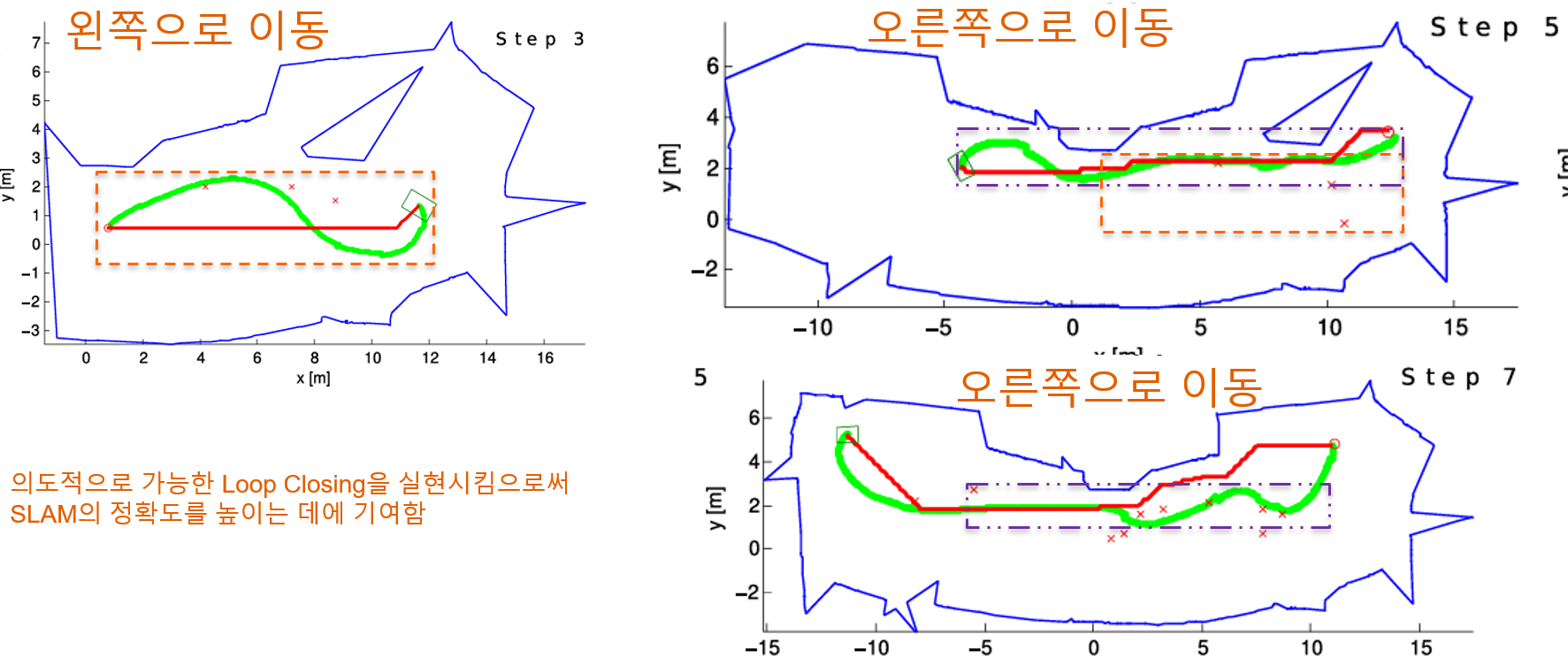
이 흐름을 염두에 두고 보면 이후 과정들도 똑같다는 것을 알 수 있다. 과거의 경로를 지나오는 과정에서 생긴 Node들에 가까워질 때 Loop Closing을 일부러 일으키도록 하여 SLAM의 정확도를 높이는 방법론임을 알 수 있다.
이 논문은 Active SLAM의 한 방법론을 다루는데, 사용하는 SLAM의 종류는 Graph-based SLAM이었다. 그리고 이 SLAM은 Loop Closing이 발생하는 편이 더 높은 정확도의 지도를 만들 수 있다는 특징이 있었다. 따라서 이 논문에서는 D* 알고리즘에 Negative 가중치를 Loop Closing이 필요한 Node에 부여하여 경유지 역할을 할 수 있도록 만들었다.
이 논문의 장점은 비교적 단순한 알고리즘을 사용하면서도 Active SLAM의 개괄적인 내용을 다루기 때문에 입문하기에 좋다. 하지만 Loop Closing을 사용하는 것을 보면 알 수 있듯 SLAM의 정확도를 높힌다는 것은 SLAM이 작동하는 것에 불신이 있다는 것을 의미한다. 요즘은 그러한 SLAM이 별로 없다는 것을 고려했을 때 현재로선 굳이 Loop Closing에 초점을 맞춰서 진행할 필요가 없다는 것이다.
그리고 6년이 흘러서 새로운 논문이 나오게 되는데…
Adaptive Yaw
2024년 발표된 “Autonomous Exploration Method for Fast Unknown Environment Mapping by Using UAV Equipped With Limited FOV Sensor” 논문은 위 ND* 논문과는 다른 특징을 가진 Active SLAM을 제안한다.
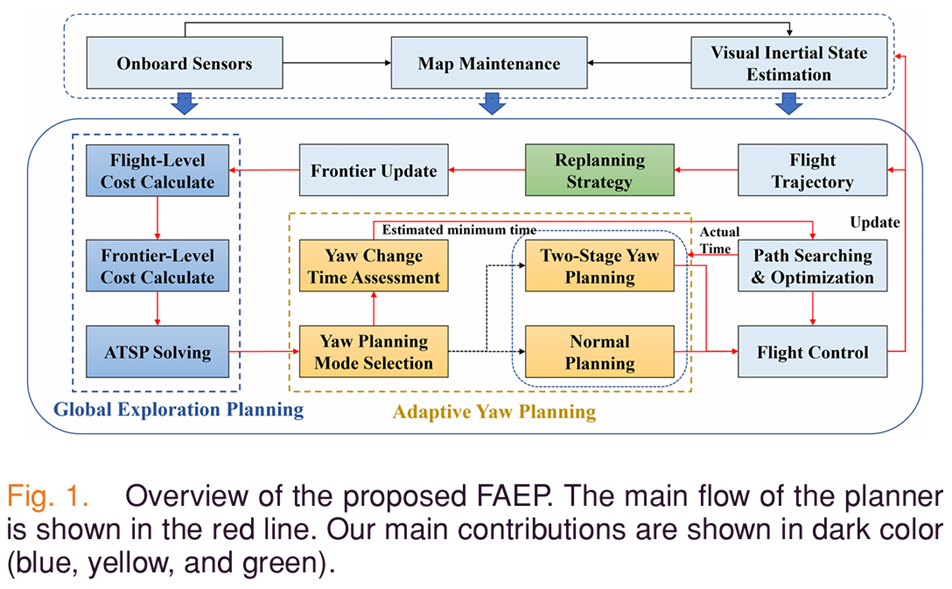
위 Fig 19 에서는 이 논문이 어떻게 흘러가는지 알 수 있다. 여기서 중요한 것은 전역 경로를 계획하는 것과 적응형 Yaw 계획을 의미한다. 이중에서 핵심은 Adaptive Yaw Planning이다.
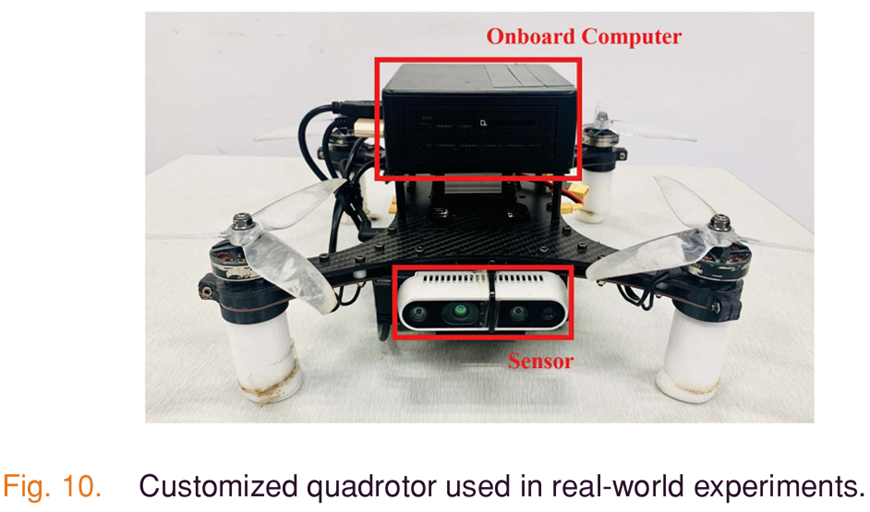
위 논문의 제목을 보면 FOV Sensor가 있는 걸 볼 수 있다. 이는 Fig 20에서 보면 알 수 있듯 카메라를 사용하기 때문이다. (사용하는 카메라는 RGB-D Realsense 인 듯 하다.) 이를 드론에 장착하여 사용하는 것이다. 그리고 드론의 가운데에는 Onboard Computer가 있다.
이제 이 논문의 방법론을 살펴봐야 하는데, 서론 부분에서 잠깐 봐야 할 부분이 있다. 여기서는 Active SLAM은 두가지 부류가 있다고 한다. (정확히는 Deep Learning 포함 3가진데, 이건 논문에서도 언급만 하고 생략함) Sampling과 Frontier방식을 말하는데, 여기서는 두 분야를 대표하는 논문으로 가장 오래된 논문의 그림을 가져왔다.
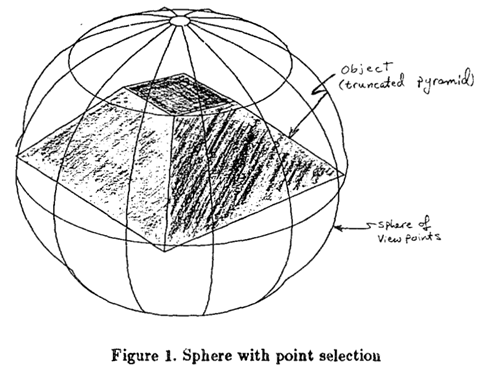
그림에서 연륜이 느껴지는데, 1985년에 나온 근본 논문이다. 이 그림은 Sampling 기법을 표현하였는데, 안쪽의 검은색으로 칠해진 덜 완성된 피라미드 모양을 관측할 수 있는 가장 좋은 위치를 찾고자 하는 것이다.
저 구의 표면상에 좌표 점들을 촤르륵 뿌려서(Sampling) 그 점들 중에 도형의 가장 넓은 면적을 관측할 수 있는 점을 찾는 것을 기준으로 선택하는 것이다.
다만, 여기서는 Sampling 기법을 소개만 하고 따로 사용하지는 않았다.

이건 야마우치라는 사람이 제안한 Frontier이다. 앞서 설명을 한 그 Frontier 방식이 맞다. 짧게 다시 설명하자면 다음과 같다.
1) 경계선 찾기: 알려진 영역과 미지 영역의 경계(frontier)를 탐지.
2) 순서 문제 해결: 경계선을 방문하기 위한 글로벌 경로(순서)를 계산.
쉽게 말하자면 아직 맵핑되지 않으면서 이동 및 관측 가능한 부분을 중심으로 그 주위로 움직이는 것을 의미한다.
그렇다면 이 논문에서는 Frontier 탐사 방식을 어떻게 적용했을까?
Bottom Ray
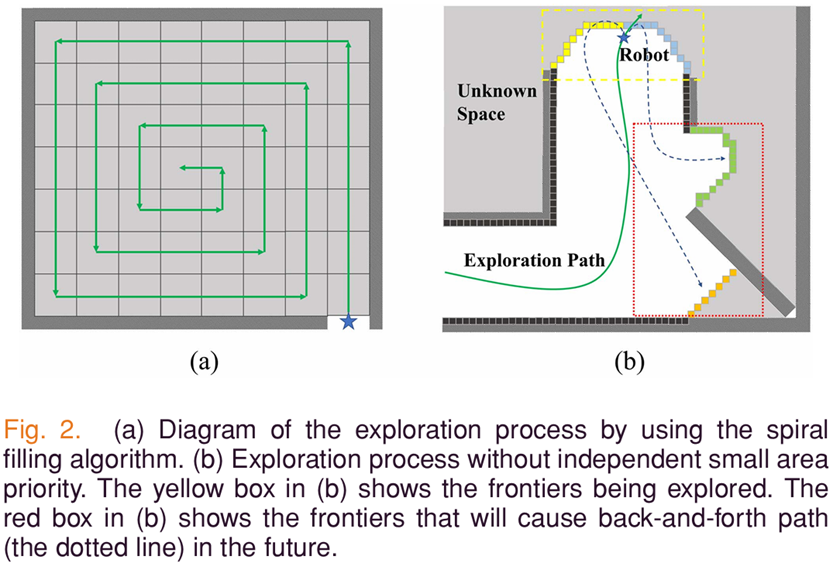
위 그림을 보면 이 논문의 철학이 아까 위에서 말한 D*를 사용한 논문과는 다르다는 걸 알 수 있다. Fig 23(a)를 보면 spiral 알고리즘을 말한다. 이는 로봇이 어느 한 곳을 들렀다면, 그곳을 다시 들르지 않고 이동한다는 말이다. 즉, 최대한 중복해서 이동하는 것을 방지하겠다는 뜻이다.
만약 중복해서 이동하는 것에 대해서 너무 관대할 경우 Fig 23(b)와 같을 것이라 경고한다. 노란색 구역으로 간 이후 빨간색 구역으로 이동하는 것은 너무 비효율적이다. 그러니 만약 가게 된다면 빨간색 구역을 볼 수 있는 한 보고 노란색 구역으로 가면 시간적으로 빠르게 해결할 수 있다는 것이다.
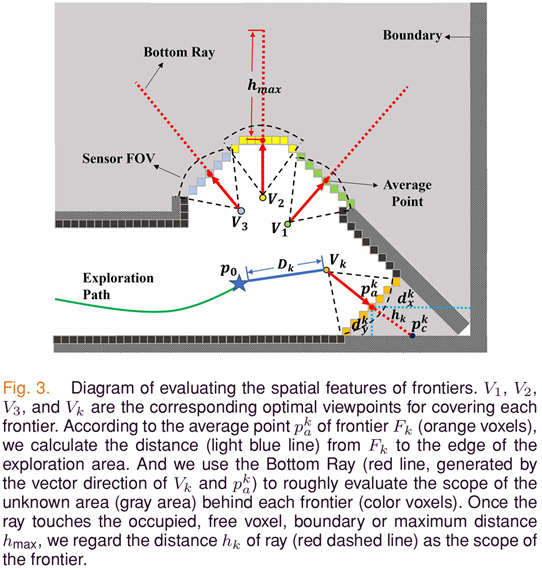
그렇다면 많은 frontier들 중에서 볼만한 가치가 있는 곳이 어디인지 그 우선순위는 어떻게 결정하는 것일까? 이 논문에서는 그 방법으로 Bottom Ray를 제안한다.
Bottom Ray는 어느 한 구역에 존재하는 Frontier들에 대해서 근처에 가서 기존의 Frontier와 그 너머에 존재하는 실제 깊이를 측정하였을 때 그 괴리가 얼마나 큰지에 따라서 이후 Frontier들에 대한 우선순위를 매기는 방식이다. Fig 24의 경우 오른쪽 아래 주황색이 위쪽 3개 색상의 Frontier들 보다 우선으로 방문하는 것이 그 예이다. 괴리가 작을수록 먼저 들러서 반복 이동할 상황을 최소화 하는 것이다.
Adaptive Yaw
이 논문을 짧게 소개하는 챕터의 제목으로 쓴 것과 동일한 소챕터이다. 즉, 이 논문에서 가장 중요한 것이라는 의미이다.
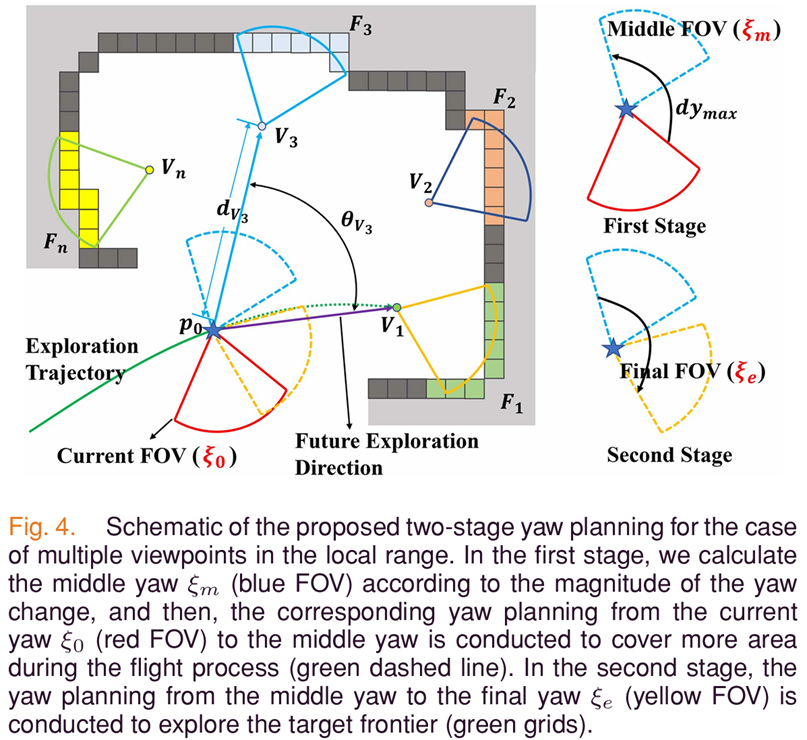
위 내용을 먼저 요약하자면 특정 Yaw로 바뀔 때 시간적 하드웨어적 여유가 된다면 중간 Yaw를 추가로 설정하여 FOV(Field of View) 한계를 극복하는 것을 제안한다.
정확히 제안하는 바는 2가지이다. 하나는 일반적인 Yaw 변경. 이는 평범한 그것이다. 다른 하나는 2단계로 구성된 Yaw 변경을 의미한다. 그리고 이 2단계로 구성되는 Yaw 변경은 다음 조건을 만족해야만 한다. 하드웨어적으로 바꿀 수 있는 Yaw 변경 가능 가속도를 고려할 것. 그리고 시간적으로 Yaw를 바꿀 수 있는 여유 범위 내에서 진행할 것. 즉, 단조롭게 이동하는 것 만으로는 좁은 시야각으로 할 수 있는 것이 한정되기 때문에 이를 해결하기 위해 조금 더 관측을 하려는 것을 의미한다.
Fig 25를 보면 빨간색에서 노랜색 yaw로 바꾸는 것은 얻을 수 있는 정보가 매우 제한되지만, 그 중간에 파란색 yaw를 추가해서 크게 돌아주면 더 많은 것을 볼 수 있다는 것이다.
이게 단순해 보이지만 추후 연구 실험을 결과를 보면 큰 차이를 만들어낸다.
Optimization and Replanning
다른 내용들을 제안하긴 했는데, 해당 내용들은 핵심은 아니다. 약간 테크니컬한 내용이 중심으로 적혀져있다.

Fig 26은 미래 경로를 선택함에 있어서 1초 내외의 시간 이후의 로봇의 위치를 고려하여 새로운 경로를 예측한다는 말이다. 이게 그냥 보면 잘 이해 안되는데, 이 논문 저자가 극한의 효율을 추구한다고 생각하고 보면 이해가 된다. 앞서 2단계 적응형 yaw를 언급했는데, 이것도 FOV에서 효율을 추구하면서 버려지는 시간과 능력을 사용한 것이다. 이것도 똑같다. 로봇이 현재의 위치를 바탕으로 경로계획 해봤자 어차피 1초 뒤에는 다른 위치에 있을 것인데. 그럴거면 그 1초 뒤의 위치를 예측해서 그 위치부터 경로계획을 하는게 더 계산 효율적이라는 것이다.
위 식에서 𝜌는 확장계수이다. 환경 변화가 적은 경우 𝜌를 크게 설정해 재계획 간격을 늘리고, 환경 변화가 많은 경우 𝜌를 작게 설정해 재계획을 더 자주 실행한다.
다른 방법들도 동원되었는데, Kinodynamic Path Searching는 동적 제약 조건을 고려하여 충돌이 없는 경로 탐색하게 하고, B-spline Path Optimization을 활용해서 부드럽고 안전한 경로로 최적화한다.
Experiment
Fig 27을 보면 Proposed는 제안된 방법, FUEL은 Frontier 탐사 방법(중 하나), NBVP는 샘플링 탐사 기법(중 하나), Aeplanner는 NBVP의 확장(Frontier 결합)한 것들의 그 결과를 볼 수 있다.
말할 필요는 없겠지만 당연히도 제안된 방법이 가장 빨랐고, 그 다음이 Frontier를 사용한 방법이었다. 샘플링 방법은 너무 오래걸린다는 것이다.
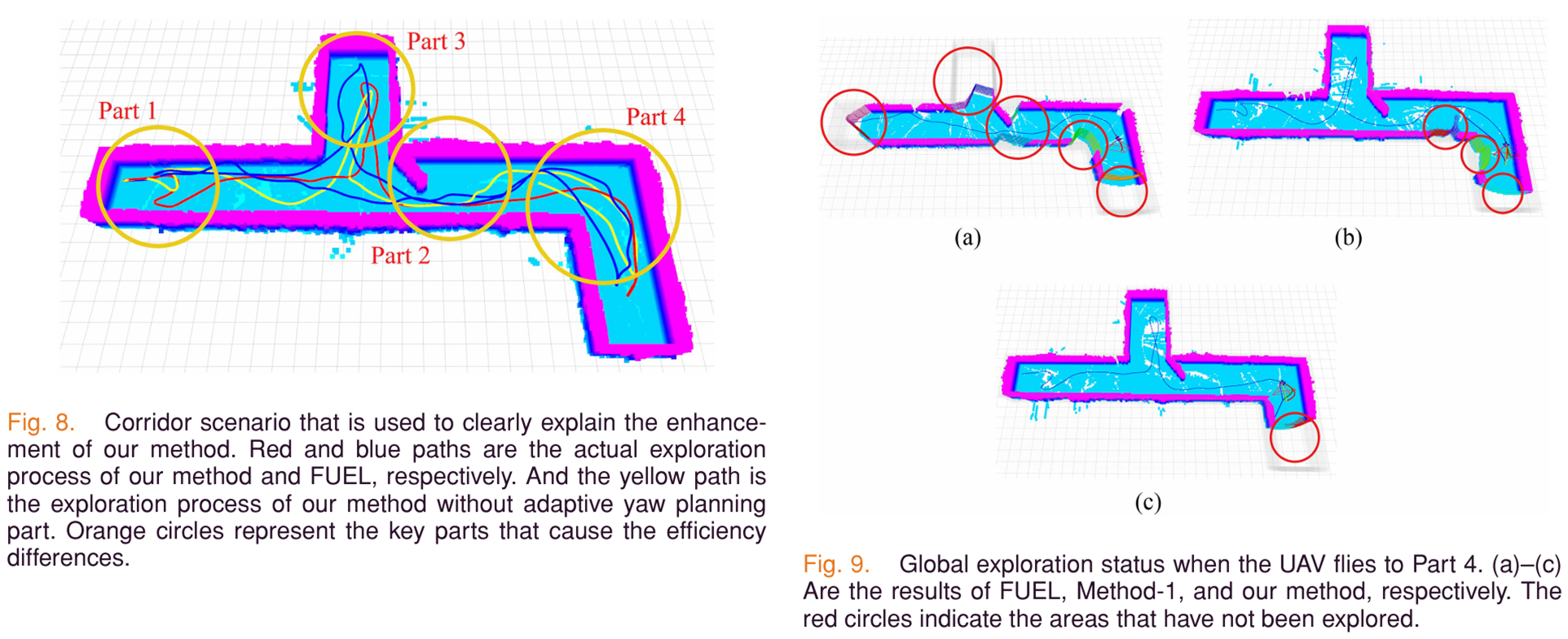
Fig 28은 Frontier와 제안된 방법에서 적응형 Yaw를 쓰고 안쓰고 한 버전을 비교한 사진인데, 매핑이 조금 어그러진 것과 경로가 더 깔끔한지의 여부 등에서 차이가 있음을 알 수 있다.

Fig 29는 실제로 드론을 통해서 실험을 진행한 모습이다. 지금까지의 실험 자료들은 모두 본 논문에서 공개한 유튜브 영상으로 볼 수 있다.
이 논문의 한계는 LiDAR를 사용하지 않았던 것이다. FOV때문에 해결 방법으로 제시한 적응형 Yaw는 매핑과 위치인식에 있어서는 LiDAR에 밀린다는 것이다. 이를 보완할 수 있다면 더 좋은 방법을 마련할 수 있을 것이다.
Simulation
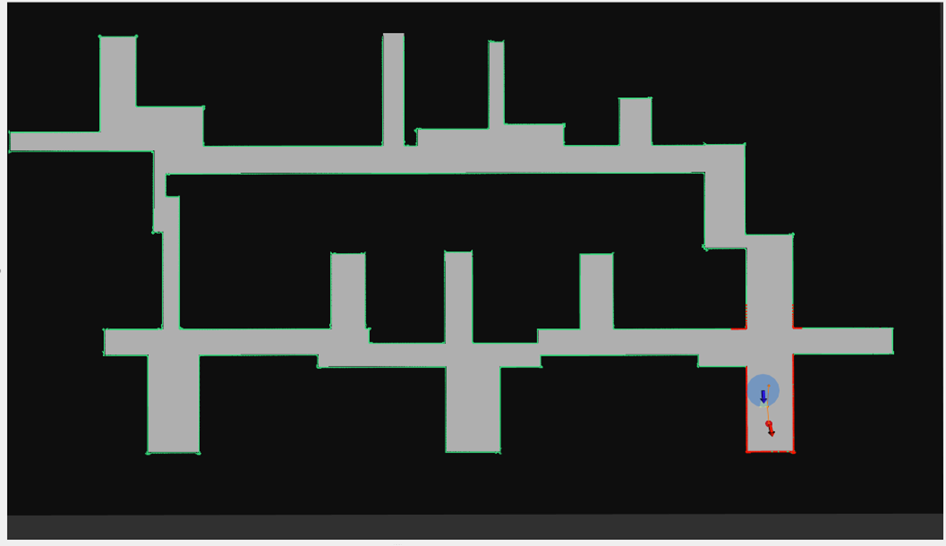
이제 연구를 시작하려 하는데, 논문 조사만 하는 것은 매너리즘에 빠지기 쉬우므로 Active SLAM 시뮬레이션을 만들려고 하였다.
로봇을 중심으로 라이다를 쏘고, 매핑된 부분은 초록색으로 표현하였다.
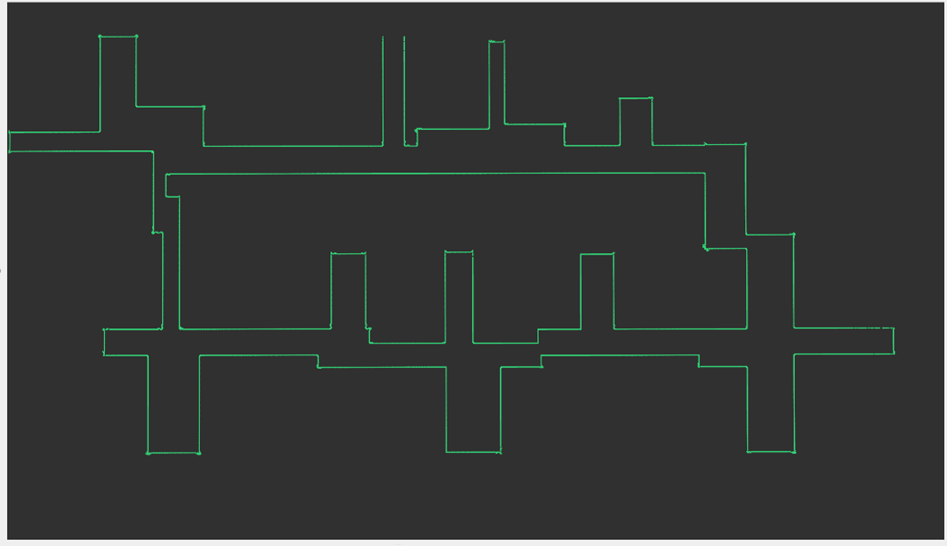
그렇게 완성된 누적된 라이다들을 모아서 보면 Fig 31과 같이 나온다.
Fig 32는 여기에 Frontier를 적용하여 실시간으로 이동하면서 매핑됨과 동시에 Frontier 변화 양상을 볼 수 있도록 하였다.
향후 계획
앞서 살펴본 두 논문은 적어도 내가 보기엔 Active SLAM의 기초 내용부터 잘 알수 있도록 만들고 각자가 직면한 문제를 해결하고자 한 훌륭한 논문이었다.
하지만 모든 논문이 그렇듯 정의된 문제 상황에 대해서 해결될 방법을 제시할 뿐, 그렇지 않은 환경이나 문제에 대해서는 그 해결 방법이 좋다고 할 수는 없다.
가령 D* 알고리즘을 활용한 경우는 Negative 가중치 노드를 활용하여 경유지를 설정함으로써 SLAM의 맵핑과 최적화를 진행하도록 하였다. 하지만 이는 Graph-based SLAM 최적화 방식을 사용하지 않는 경우 활용이 필요 없게 된다. 그리고 Adaptive Yaw를 사용하는 경우엔 RGB-D를 사용하지 않고 3D LiDAR를 사용하는 경우 그 의미가 퇴색되게 된다.
즉, 최소한 연구자 입장에서 새로운 문제 상황을 정의할 수 있고 그걸 해결할 수 있어야 한다는 것이다. 위 두 논문이 그렇게 하였듯 나도 그렇게 해야한다.
현재 생각하는 문제 상황은 어떤 하나로 결정되지는 않았으나, 산발적인 키워드들의 집합으로 어렴풋이 정해져있다.
실내&실외, 3D LiDAR, Active SLAM, Drone(혹은 UAV), UGV(무인지상차), Q(Quadrupedal)UGV(스팟 같은 4족 보행들).
이들 키워드 중에서 가장 중요한 것은 바로 3D LiDAR이다. Active SLAM 자체에 대한 기술적 고찰은 많이 있어왔으나, 3D LiDAR SLAM을 본격적으로 사용하여 다루는 경우는 많이 없었다.
따라서 이를 염두하고 논문을 조사한 다음 2월 중순에 들어서기 전까지, 연구할 주제의 핵심 아이디어를 도출하는 것이 현재 주요 목표이다.
미완성 수정중 - 그림 캡션 수정해야함
